近日,大華股份基于深度學(xué)習(xí)的雙目立體匹配算法�����,刷新了KITTI Vision Benchmark中雙目立體匹配競賽的最好成績�����,超越了其它一流AI公司和頂尖的學(xué)術(shù)研究機(jī)構(gòu)����,以及ICCV�����、ECCV����、CVPR相關(guān)論文中的雙目立體匹配研究成果,這標(biāo)志著大華股份在雙目立體匹配算法領(lǐng)域處于領(lǐng)先水平���。
大華股份在AI技術(shù)領(lǐng)域持續(xù)耕耘與創(chuàng)新��,不斷提升算法����、算力的核心競爭力。2018年���,大華股份取得道路分割����、車輛跟隨����、多目標(biāo)跟蹤、3D目標(biāo)檢測���、人體檢測、車輛檢測�����、場景流、光流�����、行人檢索等12項全球AI排行榜第一����;2019年�����,大華股份取得行人重識別�、目標(biāo)實(shí)例分割、圖像語義分割�����、步態(tài)識別�、遙感圖像分析等十項全球AI排行榜第一。2020年初�����,大華股份在 MIT Scene Parsing Benchmark場景解析任務(wù)中取得了第一����。本次在雙目立體匹配算法領(lǐng)域再次取得新突破���。大華股份積極加速AI技術(shù)成果向現(xiàn)實(shí)生產(chǎn)力轉(zhuǎn)化,賦能行業(yè)智能化升級�。
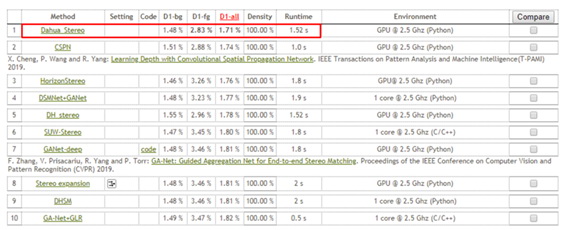
大華股份AI最新雙目立體匹配算法評測全球排名第一(提交時間:2020.04.07)
(截圖來源:www.cvlibs.net/datasets/kitti/eval_scene_flow.php?benchmark=stereo)
關(guān)于KITTI:
KITTI數(shù)據(jù)集由德國卡爾斯魯厄理工學(xué)院和豐田美國技術(shù)研究院聯(lián)合創(chuàng)辦,是目前國際上最大的計算機(jī)視覺算法評測數(shù)據(jù)集之一�。數(shù)據(jù)集用于評測立體匹配(stereo)、光流(flow)���、場景流(sceneflow)��、視覺里程計(visual odometry)�����、物體檢測(object detection)和跟蹤(tracking)�、道路分割(road)�����、語義分割(semantics)等計算機(jī)視覺技術(shù)在車載環(huán)境下的性能�。KITTI包含市區(qū)���、鄉(xiāng)村和高速公路等場景采集的真實(shí)圖像數(shù)據(jù)�����,每張圖像中最多包含15輛車和30個行人���,且存在不同程度的遮擋與截斷��。
雙目立體匹配:
雙目立體匹配是場景三維感知的重要手段�����,在3D重建,智能機(jī)器人�����、自動駕駛�����、AR等領(lǐng)域中有著廣泛的應(yīng)用�����。雙目立體匹配算法通過對左右目相機(jī)拍攝的圖像進(jìn)行相似性匹配,并獲得視差圖���,隨后根據(jù)立體幾何原理推測場景深度。
在本次國際測評中�����,大華基于自主研發(fā)的深度學(xué)習(xí)平臺��,開發(fā)了一種基于深度神經(jīng)網(wǎng)絡(luò)的立體匹配算法����。該算法采用了ASPP的結(jié)構(gòu)對輸入圖像進(jìn)行多尺度特征提取,并將傳統(tǒng)的SGM算法融入到神經(jīng)網(wǎng)絡(luò)中�。此外,在訓(xùn)練過程中加入了額外的自監(jiān)督學(xué)習(xí)策略��,有效地提高了算法的精度��。

輸入圖像(一)
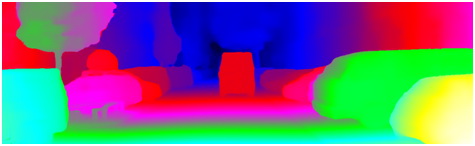
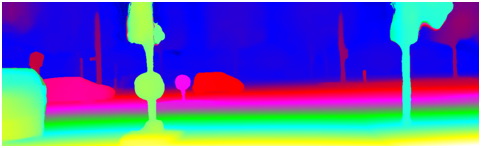
可視化視差圖(一)

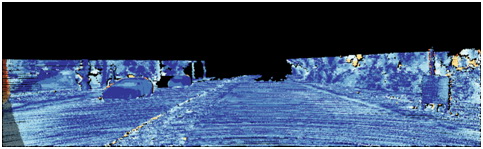
誤差圖(一)

輸入圖像(二)
可視化視差圖(二)
誤差圖(二)
△以上圖片為該國際權(quán)威評測數(shù)據(jù)集的立體匹配算法效果圖
大華實(shí)際產(chǎn)品和未來產(chǎn)品中的應(yīng)用
➢室外3D重建:
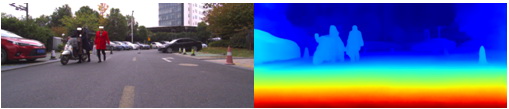
場景視差圖
➢起立檢測:
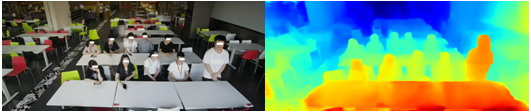
場景視差圖
本次評測中使用的技術(shù)已在大華雙目攝像機(jī)等產(chǎn)品中得到應(yīng)用�����,提升了雙目攝像機(jī)的捕獲目標(biāo)深度數(shù)據(jù)�、目標(biāo)分離等性能,賦能場景化應(yīng)用價值�。